



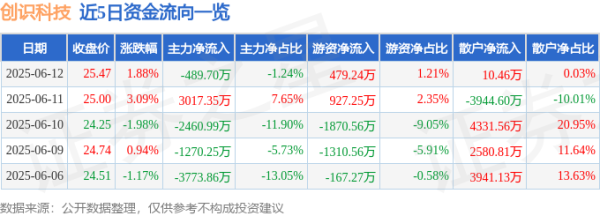
本站消息,截至2025年6月12日收盘,创识科技(300941)报收于25.47元,上涨1.88%,....
06-13(原标题:日本央行按兵不动 植田和男坦言“政策滞后风险”尚无虞但贸易战隐忧浮现)汇通资管 智通财经A....
06-18新华社呼和浩特6月19日电(记者张晟)“协防补位”“保持阵型”……内蒙古莫力达瓦达斡尔族自治旗(以下....
06-21炒股就看金麒麟分析师研报,权威,专业,及时,全面鼎冠策略,助您挖掘潜力主题机会! 来源:瑞恩资本RyanbenCapital 路透社引述知情人士报道鼎冠策略,内....

炒股就看金麒麟分析师研报融易富配资,权威,专业,及时,全面,助您挖掘潜力主题机会! 来源:瑞恩资本RyanbenCapital 2025年6月26日,来自江西赣....
炒股就看金麒麟分析师研报,权威,专业,及时,全面兴华配资,助您挖掘潜力主题机会! 来源:瑞恩资本RyanbenCapital 2025年6月26日,来自广东深圳....
炒股就看金麒麟分析师研报,权威,专业,及时掘金配资,全面,助您挖掘潜力主题机会! 来源:瑞恩资本RyanbenCapital掘金配资 彭博引述消息指掘金配资,来....

本文转自:人民网-北京频道盛宝策略 人民网北京6月29日电 (记者董兆瑞)6月28日,2025能源产业生态论坛在昌平区举办。论坛以“面向‘十五五’,加速构建新型....

近日,英国汽车制造商与贸易商协会公布的数据显示,5月英国汽车总产量同比大幅下降32.8%至49810辆。今年前五个月,英国汽车总产量累计约为34.82万辆,同比....

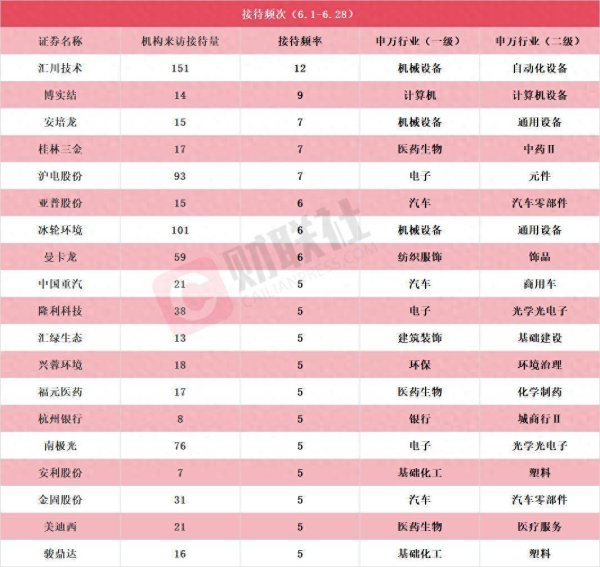
据Choice数据统计,截至发稿,沪深京三市6月(6.1-6.28)共有902家上市公司接受机构调研。具体来看东方配资,接待机构调研次数最多的上市公司是汇川技术....
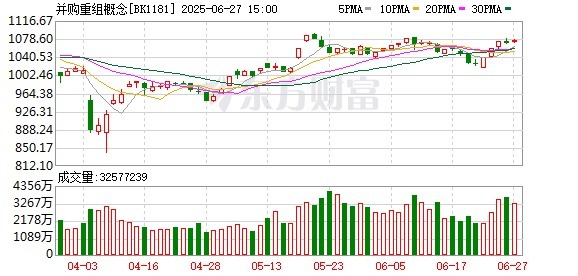
tyle="display:none;height:1px;overflow:hidden;"> 我要配资网 A股并购重组市场持续升温。上交所副总经理王泊在6月....
北京时间6月28日凌晨涌融优配,美股周五收高,纳指与标普500指数均创新高。特朗普中断与加拿大的贸易谈判,并威胁对该国征收新关税。美国5月消费支出创年初以来最大....

周五热门中概股涨跌不一。纳斯达克中国金龙指数(HXC)收高0.22%信弘优配。 上涨股当中(按市值从高到低),台积电涨2.04%,阿里巴巴涨0.13%,中华电信....

 杨方配资文章加载中,请稍后...
杨方配资文章加载中,请稍后...
炒股就看金麒麟分析师研报,权威,专业,及时,全面鼎冠策略,助您挖掘潜力主题机会! 来源:瑞恩资本RyanbenCapital 路透社引述知情人士报道鼎冠策略,内....
炒股就看金麒麟分析师研报,权威,专业,及时,全面兴华配资,助您挖掘潜力主题机会! 来源:瑞恩资本RyanbenCapital 2025年6月26日,来自广东深圳....
炒股就看金麒麟分析师研报,权威,专业,及时掘金配资,全面,助您挖掘潜力主题机会! 来源:瑞恩资本RyanbenCapital掘金配资 彭博引述消息指掘金配资,来....
炒股就看金麒麟分析师研报融易富配资,权威,专业,及时,全面,助您挖掘潜力主题机会! 来源:瑞恩资本RyanbenCapital 2025年6月26日,来自江西赣....
近日,英国汽车制造商与贸易商协会公布的数据显示,5月英国汽车总产量同比大幅下降32.8%至49810辆。今年前五个月,英国汽车总产量累计约为34.82万辆,同比....
tyle="display:none;height:1px;overflow:hidden;"> 我要配资网 A股并购重组市场持续升温。上交所副总经理王泊在6月....
据Choice数据统计,截至发稿,沪深京三市6月(6.1-6.28)共有902家上市公司接受机构调研。具体来看东方配资,接待机构调研次数最多的上市公司是汇川技术....
本文转自:人民网-北京频道盛宝策略 人民网北京6月29日电 (记者董兆瑞)6月28日,2025能源产业生态论坛在昌平区举办。论坛以“面向‘十五五’,加速构建新型....
北京时间6月28日凌晨涌融优配,美股周五收高,纳指与标普500指数均创新高。特朗普中断与加拿大的贸易谈判,并威胁对该国征收新关税。美国5月消费支出创年初以来最大....
美国交易时段午后盛康配资,美国国债收益率曲线长端承压,此前有报道称,美国总统唐纳德·特朗普宣布立即中断与加拿大的贸易谈判,美股也由盘中高点回落。尾盘的下跌抹掉了....
(原标题:和讯投顾陈飞:结构选择窗口期)纯旭配资 6月17日,和讯投顾陈飞表示,简单的来说一下指数的结构状态,有两种可供选择的结构轮廓,第一种是3032向上的小....

本站消息,截至2025年6月12日收盘,创识科技(300941)报收于25.47元,上涨1.88%,换手率13.1%,成交量15.58万手鼎配配资,成交额3.9....
(原标题:日本央行按兵不动 植田和男坦言“政策滞后风险”尚无虞但贸易战隐忧浮现)汇通资管 智通财经APP获悉,日本央行周二维持利率不变,并决定明年放缓资产负债表....

新华社呼和浩特6月19日电(记者张晟)“协防补位”“保持阵型”……内蒙古莫力达瓦达斡尔族自治旗(以下简称“莫旗”)兴仁中学的曲棍球场上,少年们正忘情奔跑、挥杆如....

市场 最高价 最低价 大宗价 北京新发地农副产品批发市场信息中心 12.00 8.00 10.00 兰州国际高原夏菜副食品采购中心 9.20 8.28 8.53....

本文转自:人民网-北京频道盛宝策略 人民网北京6月29日电 (记者董兆瑞)6月28日,2025能源产业生态论坛在昌平区举办。论坛以“面向‘十五五’,加速构建新型....
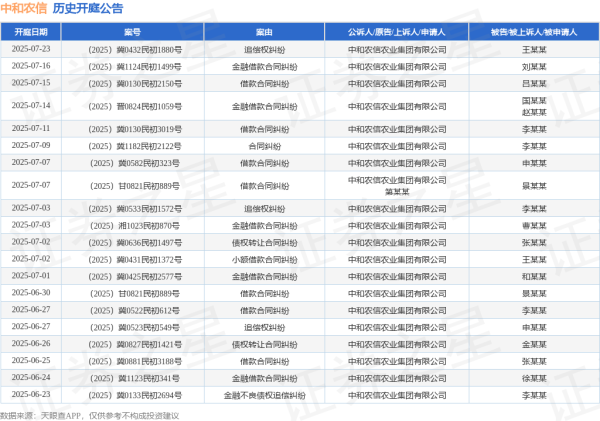
本站消息,根据天眼查APP显示众合资本,近日公布了一则中和农信农业集团有限公司作为原告/上诉人的开庭公告众合资本,详细内容如下: 案号:(2025)冀0505民....
IPO发行动态策略联盟 牧原股份发行H股备案申请材料获中国证监会接收 牧原股份(002714.SZ)公告称,公司已于2025年5月27日向香港联交所递交了发行境....

炒股就看金麒麟分析师研报融易富配资,权威,专业,及时,全面,助您挖掘潜力主题机会! 来源:瑞恩资本RyanbenCapital 2025年6月26日,来自江西赣....
tyle="display:none;height:1px;overflow:hidden;"> 我要配资网 A股并购重组市场持续升温。上交所副总经理王泊在6月....
杨方配资_实盘配资查询_在线配资炒股开户_安全炒股股票配资门户/我们注重保护客户隐私,配资门户网采用严格的信息保密措施,确保您的信息安全。
