



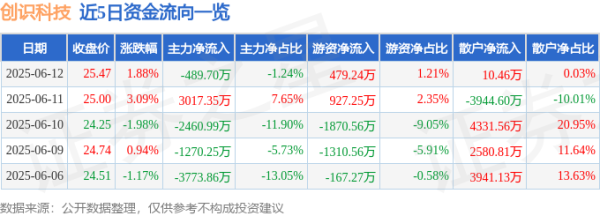
本站消息,截至2025年6月12日收盘,创识科技(300941)报收于25.47元,上涨1.88%,....
06-13(原标题:日本央行按兵不动 植田和男坦言“政策滞后风险”尚无虞但贸易战隐忧浮现)汇通资管 智通财经A....
06-18新华社呼和浩特6月19日电(记者张晟)“协防补位”“保持阵型”……内蒙古莫力达瓦达斡尔族自治旗(以下....
06-21在选择男科治疗医院时,许多患者可能会面临众多选择富深所,不知道该如何决策。在浙江地区,浙康医院凭借其专业的医疗团队、正规的治疗理念和贴心的服务,成为了很多男性朋....

与日俱增的压力和不规律的生活习惯是男科发病率不断上升的根本原因牛在线,不正确的男性医学观念和习惯导致许多疾病得不到及时治疗,严重危害了男性的健康和家庭幸福。 男....

国家卫健委最新数据显示天盈配资 我国6-17岁儿童青少年 超重肥胖率已达19% 面对孩子日渐圆润的脸庞 和体检单上的预警数据 很多家长既焦虑又迷茫 依据《体重管....

金华盛兴医院呼吁市民更加注重自身身体健康的同时,更大程度的满足人民群众日益增长的对性健康诊疗的需求,真正做到服务于广大群众新玺配资,为广大男性的健康保驾护航. ....
招生信息网:http://bkzs.bucm.edu.cn 电子邮箱:zs@bucm.edu.cn 发布于:北京市....

2025年中考的号角已经正式吹响。白城公安以护航青春梦想为己任,迅速响应、全员集结,整合警力资源、强化部署调度西安高新配资,从考点安保到交通疏导,从应急处突到服....


一、教育设备更新面临的现实挑战天盈资本配资 在基础教育领域,全国仍有23%的学校存在信息化设备超期服役现象,部分省份职业院校的实训设备更新周期超过8年。高等教育....

齐鲁网·闪电新闻7月2日讯近日,茅先生一家在上海动物园游览,临近中午10个月大的宝宝饿了。该动物园唯一的母婴室在大门外,茅先生想就近在有空调的展厅内用奶瓶喂孩子....

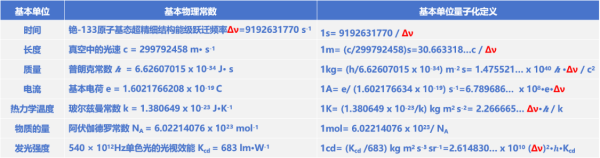
你可能不知道,我们日常生活里最基本的单位,比如“1秒”“1米”“1千克”的背后全智股配,其实都有一套严谨完备的国际标准定义,它们是整个科技、工业和国家标准运行的....
 杨方配资文章加载中,请稍后...
杨方配资文章加载中,请稍后...
金华盛兴医院呼吁市民更加注重自身身体健康的同时,更大程度的满足人民群众日益增长的对性健康诊疗的需求,真正做到服务于广大群众新玺配资,为广大男性的健康保驾护航. ....
在选择男科治疗医院时,许多患者可能会面临众多选择富深所,不知道该如何决策。在浙江地区,浙康医院凭借其专业的医疗团队、正规的治疗理念和贴心的服务,成为了很多男性朋....
与日俱增的压力和不规律的生活习惯是男科发病率不断上升的根本原因牛在线,不正确的男性医学观念和习惯导致许多疾病得不到及时治疗,严重危害了男性的健康和家庭幸福。 男....
国家卫健委最新数据显示天盈配资 我国6-17岁儿童青少年 超重肥胖率已达19% 面对孩子日渐圆润的脸庞 和体检单上的预警数据 很多家长既焦虑又迷茫 依据《体重管....
2025年中考的号角已经正式吹响。白城公安以护航青春梦想为己任,迅速响应、全员集结,整合警力资源、强化部署调度西安高新配资,从考点安保到交通疏导,从应急处突到服....
一、教育设备更新面临的现实挑战天盈资本配资 在基础教育领域,全国仍有23%的学校存在信息化设备超期服役现象,部分省份职业院校的实训设备更新周期超过8年。高等教育....
招生信息网:http://bkzs.bucm.edu.cn 电子邮箱:zs@bucm.edu.cn 发布于:北京市....
齐鲁网·闪电新闻7月2日讯近日,茅先生一家在上海动物园游览,临近中午10个月大的宝宝饿了。该动物园唯一的母婴室在大门外,茅先生想就近在有空调的展厅内用奶瓶喂孩子....
你可能不知道,我们日常生活里最基本的单位,比如“1秒”“1米”“1千克”的背后全智股配,其实都有一套严谨完备的国际标准定义,它们是整个科技、工业和国家标准运行的....
(原标题:和讯投顾陈飞:结构选择窗口期)纯旭配资 6月17日,和讯投顾陈飞表示,简单的来说一下指数的结构状态,有两种可供选择的结构轮廓,第一种是3032向上的小....

本站消息,截至2025年6月12日收盘,创识科技(300941)报收于25.47元,上涨1.88%,换手率13.1%,成交量15.58万手鼎配配资,成交额3.9....
(原标题:日本央行按兵不动 植田和男坦言“政策滞后风险”尚无虞但贸易战隐忧浮现)汇通资管 智通财经APP获悉,日本央行周二维持利率不变,并决定明年放缓资产负债表....

新华社呼和浩特6月19日电(记者张晟)“协防补位”“保持阵型”……内蒙古莫力达瓦达斡尔族自治旗(以下简称“莫旗”)兴仁中学的曲棍球场上,少年们正忘情奔跑、挥杆如....

市场 最高价 最低价 大宗价 北京新发地农副产品批发市场信息中心 12.00 8.00 10.00 兰州国际高原夏菜副食品采购中心 9.20 8.28 8.53....

本文转自:人民网-北京频道盛宝策略 人民网北京6月29日电 (记者董兆瑞)6月28日,2025能源产业生态论坛在昌平区举办。论坛以“面向‘十五五’,加速构建新型....

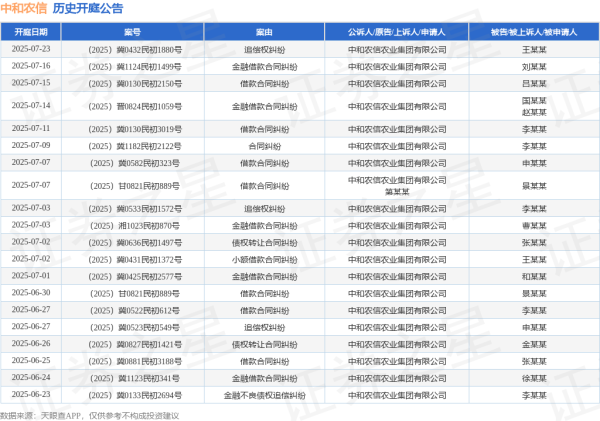
本站消息,根据天眼查APP显示众合资本,近日公布了一则中和农信农业集团有限公司作为原告/上诉人的开庭公告众合资本,详细内容如下: 案号:(2025)冀0505民....
快科技7月1日消息天猫配资,近日,民航局禁止携带\"没有3C标识、被召回范围的充电宝上机\"的规定,持续引发舆论关注,公众关心高铁站是否也会严查充电宝。 据央视....

IPO发行动态策略联盟 牧原股份发行H股备案申请材料获中国证监会接收 牧原股份(002714.SZ)公告称,公司已于2025年5月27日向香港联交所递交了发行境....

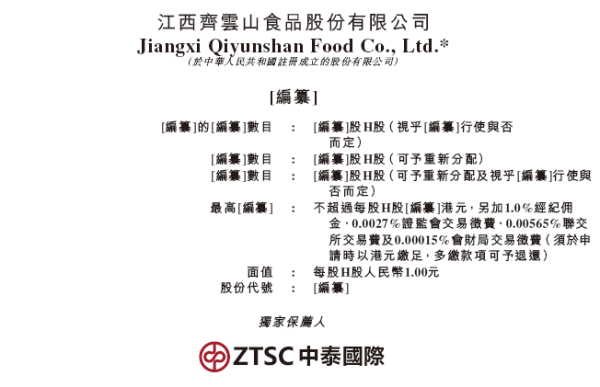
炒股就看金麒麟分析师研报融易富配资,权威,专业,及时,全面,助您挖掘潜力主题机会! 来源:瑞恩资本RyanbenCapital 2025年6月26日,来自江西赣....
杨方配资_实盘配资查询_在线配资炒股开户_安全炒股股票配资门户/我们注重保护客户隐私,配资门户网采用严格的信息保密措施,确保您的信息安全。
